Teleoperation with a Twelve-DOF Coarse-Fine Manipulator
Bert Unger, Storm Orion, Ralph Hollis
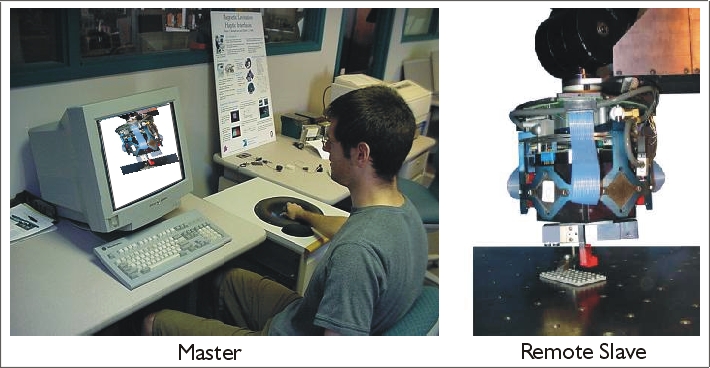
A six-degree-of-freedom robot arm with six-degree-of-freedom magnetic levitation wrist, controlled in teleoperation
The magnetic levitation haptic interface device , and its counterpart, the Magic Wrist, have high position bandwidth and fine resolution but small workspaces. In order to provide a larger workspace we have developed a teleoperation system that uses the haptic device as a master and an industrial robot, the PUMA 560, as a carrier for the Magic Wrist. This system has 6-DOF fine motion capabilities, a 6-DOF workspace larger than one cubic meter while retaining the high force and position bandwidths of the magnetic levitation devices. It is capable of bilateral force reflection. This type of system was originally developed by Tim Salcudean's group at the University of British Columbia. Please refer to the paper "Design and Control of a Force-Reflecting Teleoperation System with Magnetically Levitated Master and Wrist."
System Design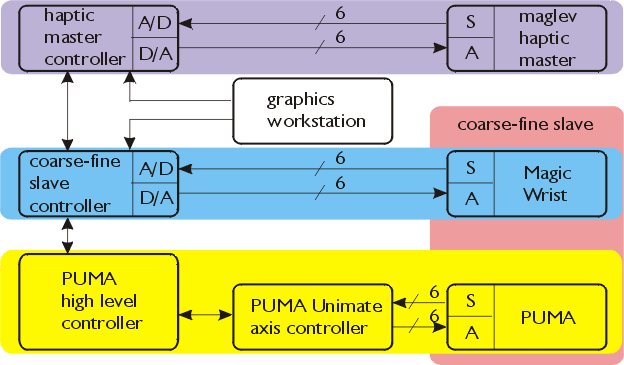
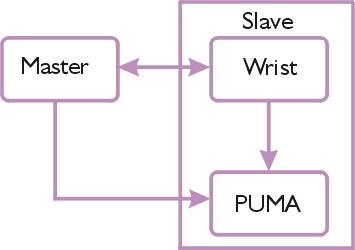
The system is composed of two magnetic levitation devices: the magnetic levitation haptic master and the Magic Wrist slave. The wrist is attached to a PUMA 560 industrial arm. Each device has a separate controller running on a dedicated platform. The haptic master is controlled by an AMD XP 2000+ processor with IP330 A/D and IP220 D/A cards. Its control loop runs at 1KHz. The Magic Wrist is controlled by another AMD XP2000+ processor with IP330 A/D and IP220 D/A cards and also has a servo loop of 1KHz. The PUMA is controlled using a Motorola VME board (commanded from the Magic Wrist’s computer) and a Unimate Axis controller. Central system coordination and graphical user interface reside on a third AMD XP2000+ computer. Communication between all processors is via 10/100Mb Ethernet at rates approaching 1KHz for data transmission.
System Capabilities
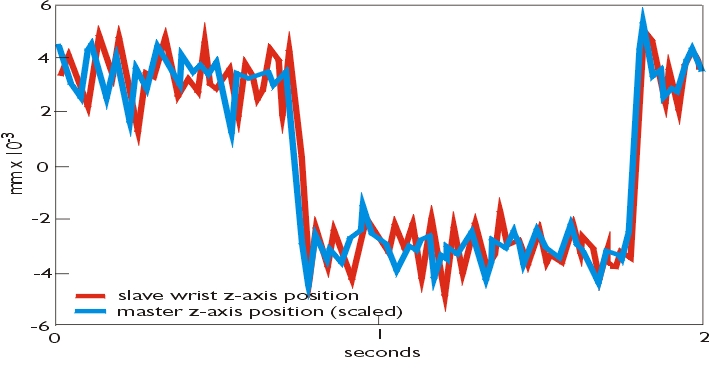
One can control the position of the wrist by having it servo to the position of the master device (properly scaled down). When a low frequency square wave is used as an input to the master, a corresponding square wave output is seen at the slave wrist. For low frequencies we have very precise tracking. In the diagram shown at the right, the master z-axis input is scaled down for comparison with the wrist z-axis output. The slave tracks the master very precisely.
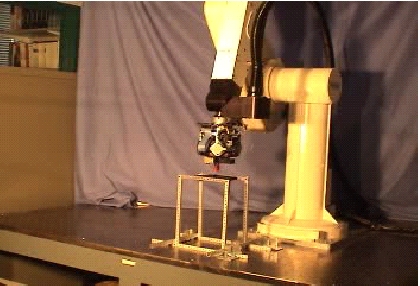
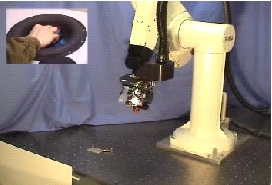
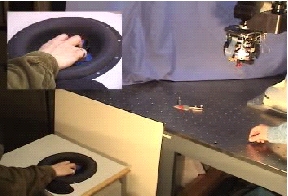
The video shown on the left (7 MB) gives a good idea of the wrist capabilities when controlled by the haptic master. Since there is really no mechanical connection between the flotors of master and slave except a few lightweight flexible wires (both are levitated), there is zero static friction and zero backlash. In this way, the mechanical limitations of conventional teleoperation systems are avoided.
Teleoperation Modes
Because there are several components to the teleoperation system it can be operated in a variety of different modes. For example, one can use each mode in a Lego assembly task.
The first, and simplest mode of operation is unilateral coarse-fine control (UCF). In this mode, the slave wrist is servoed to the master’s position and the slave wrist position is used to control the PUMA.
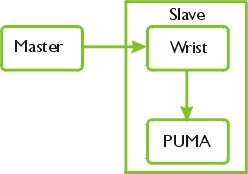

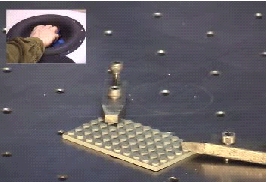
The PUMA velocity is controlled by the wrist position. If the wrist is inside a deadband, centered on its (the wrist’s) workspace, the PUMA does not move. This allows the operator to make fine motions with the wrist. Once the wrist passes outside the deadband, the PUMA is activated. The PUMA will move at a rate proportional to the distance outside the deadband, effectively trying to recenter the wrist. Since UCF has no force-reflection it is difficult to control the forces exerted during an assembly task. As well, PUMA motions induce some instability in the wrist control especially with large motions. A Lego assembly task performed with UCF can be seen in the video on the right (5.5 MB).
The second mode of control uses the master position to control the PUMA while the position of the wrist is reflected back to the master and is called Master deadband rate control (MDRC). In this mode, a deadband is placed about the center of the master’s workspace and the master’s position works to control PUMA velocity in the same way the wrist did in UCF. MDRC allows smooth operation of the PUMA, since its motion does not affect that of the master, which is controlling it. It also allows the user to feel contacts on the wrist.
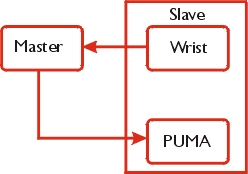
The video on the right (6.5 MB) demonstrates the improved wrist stability with MDRC as an operator performs a Lego assembly task. Note the force reflection as the operator contacts the surface with the Lego block. The wrist is servoing to its center position but is deflected by the force of contact, effectively giving the operator a force-reflecting variably compliant end-effector. Since the PUMA controls the position of the wrist, the resolution of the force reflection, and of wrist positioning is poor.
The third mode of control involves servoing the slave to the master’s position and the master to the slave’s position in a mode called symmetric bilateral control (SBC). This provides force-reflection so that an operator can feel contacts made between the slave and its operating environment while simultaneously controlling the slave’s position. The slave motion can be used to control the PUMA using the deadband technique.
The video on the left (9 MB) illustrates a "haptic handshake" using SBC.
The video on the right (6 MB) shows a Lego placement task with SBC. Coarse motions are initially made using MDRC since this mode has high stability for large motions but as the target is approached, the operator indexes to SBC. Since the operator can feel fine surface features with SBC the task time is shortened and smaller forces are applied than in the MDRC or UCF modes.
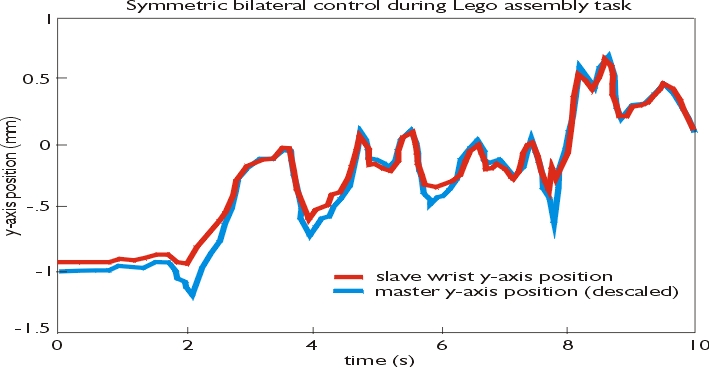
One can plot the position of the master and slave and see that they follow each other closely in this task. As can be seen, there is fairly good correspondence between the two.
Summary
The magnetic levitation coarse-fine force-reflecting teleoperation system delivers a large workspace but retains the fine positioning characteristics of the magnetic levitation master and slave. It is capable of micron-scale motion over a large workspace and provides a user with a 6-dOF haptic sense of the slave environment.
We are characterizing the operating parameters of the system, including its dynamic performance and compliance. We also would like to isolate the slave wrist from the PUMA dynamics. This may involve compensating for them in the controller. Finally, we hope to use the teleoperation system to perform psychophysics experiments to determine the level of reality that users experience when exploring an environment or performing a task using the system.
More information is available from the papers "A Telemanipulation System for Psychophysical Investigation of Haptic Interaction,'' "Design and Operation of a Force-Reflecting Magnetic Levitation Coarse-Fine Teleoperation System," and "Teleoperation Mediated Through Magnetic Levitation: Recent Results.''