Magnetic Levitation Haptic Interfaces
(This project is no longer active, and has been superseded by other projects)
Peter J. Berkelman and Ralph L. Hollis
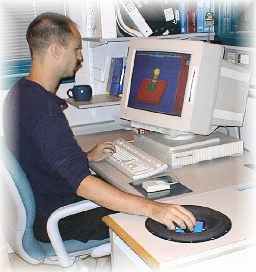
Using the Magnetic Levitation Haptic Interaction System |
Introduction:
- We have developed a haptic interface device based on Lorentz force magnetic levitation.
- The user grasps a levitated tool handle to interact with computed environments.
- The dynamics of the handle are controlled so that the user feels the motion, shape, resistance, and surface texture of simulated objects.
The magnetic levitation approach for haptic interface devices is distinctively different from actuated linkage or cable devices.
Advantages of magnetic levitation for haptic interaction are:
- 6-DOF motion with one moving part
- Noncontact actuation and sensing
- High control bandwidths
- Position resolution and sensitivity
|
Videos:
Topics: