Psychophysics of Haptic Interaction
Bertram Unger, Roberta Klatzky, Ralph Hollis, Alex Nicolaidis, Peter Berkelman, Andy Thompson, Vinithra Varadharajan, Susan Lederman (Queens University), and Andy Moore
Quantitative comparisons of human subjects performing peg-in-hole experiments with real, virtual, and real-remote haptic environments
In the Microdynamics Systems Laboratory we are interested in measuring how much reality a haptic device can deliver (its fidelity). We have used our magnetic levitation haptic interface to perform a set of psychophysical experiments that examine the way in which users interact with real and virtual haptic worlds. For an introduction, an elementary discussion of haptics can be found in the encyclopedia article "Haptics" by Ralph Hollis.
Previous investigations of haptic fidelity have mostly focused on engineering qualities related to device kinematics and dynamics such as frequency response or position bandwidth. In contrast, psychophysical studies of haptic fidelity apply careful metrics to user task performance during the execution of a simple task.
 In our experiments users are asked to insert a square peg into a square hole in both real and virtual 6- degree-of-freedom environments. Such tasks are encountered commonly in daily life and require moderately complex motions and force applications. Peg-in-hole tasks have also been well studied in automated and human assembly tasks and the possible contact states have been well studied. A real peg-in-hole task may involve point, vertex and face interactions between the peg and the hole and the simulation must therefore follow suit.
In our experiments users are asked to insert a square peg into a square hole in both real and virtual 6- degree-of-freedom environments. Such tasks are encountered commonly in daily life and require moderately complex motions and force applications. Peg-in-hole tasks have also been well studied in automated and human assembly tasks and the possible contact states have been well studied. A real peg-in-hole task may involve point, vertex and face interactions between the peg and the hole and the simulation must therefore follow suit.
We conduct three peg-in-hole experiments under differing conditions. In the first condition, subjects place a virtual peg into a virtual hole using visual and haptic feedback. The second experiment involves placing a real peg into a real hole again using haptic and visual feedback. The third experiment requires the subject to place a virtual peg in a virtual hole using only visual guidance. In each case the user interacts with the peg using the same manipulandum and graphical display..
Haptic Device
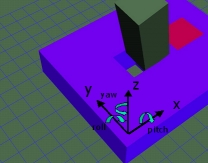
Our magnetic levitation haptic device was used to generate haptic feedback for the virtual peg-in-hole experiment. This device operates with six degrees of freedom with high position and force bandwidths and high position resolution. (See Magnetic Levitation Haptic Interfaces in Past Projects.) The haptic handle is modeled as a virtual object (a peg) in a six-degree-of-freedom environment.
Virtual Haptic Peg-in-Hole Environment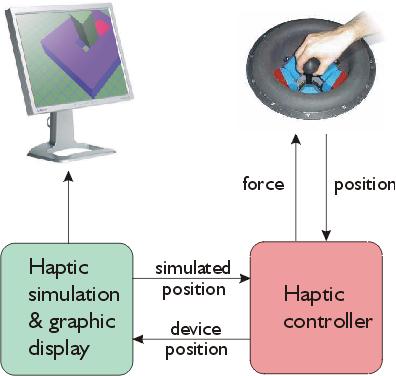
The virtual peg-in-hole experiments provides the subject with a graphic representation of a virtual peg, displayed on a monitor. The haptic device allowed the user to feel contacts between the virtual peg and virtual hole surfaces as well as apply forces to manipulate the peg. This environment was designed using Coriolis TM dynamic simulation software. This program numerically solves the differential equations of motion in the virtual environment to model peg position and contacts quickly and accurately.
Real Peg-in-Hole Environment
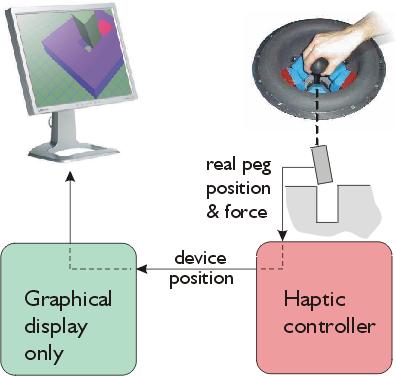
Ideally, real peg-in-hole experiments should use the same handle and graphic display as the virtual experiments. We use an interesting experimental setup to allow this. By attaching a real peg to the underside of the levitated flotor, the user is able to move the peg using the haptic device manipulandum. A real plate is placed within the haptic device enclosure, on top of a force-torque sensor. The plate has a square hole in its surface with tight clearance for the peg. We use the haptic device position sensors to detect the position of the handle and use its position to display the peg using the same graphics environment used in the virtual experiments.
Virtual Vision-Only Peg-in-Hole Environment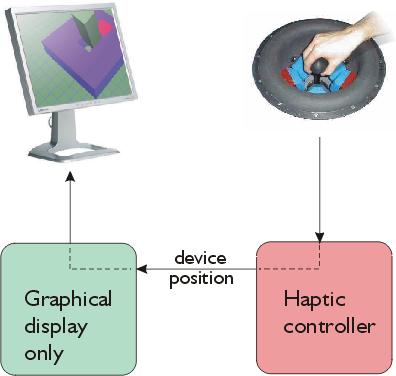
In the virtual vision-only peg-in-hole environment subjects interact with the same graphics and dynamics simulation used in the virtual haptic peg-in-hole environment but without haptic feedback. Subjects are able to see the peg, since the position of the flotor is used as an input into the virtual simulation, but unable to feel contacts.
The three experimental environments all have the same visual representation of the peg and hole and the subject uses the same manipulandum to move the peg in each case. They differ slightly in that the virtual haptic environment has gravity compensation for the weight of the flotor while the real and vision-only environments do not. There are also small differences in the location of the peg and hole between the virtual and real environments and friction is not modeled in the virtual environments (vision-only and virtual haptic).
Some Experimental Findings
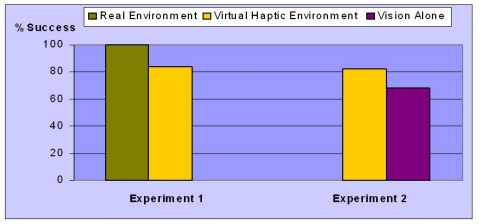
When the success rate of the peg-in-hole task is measured for all three environments, it can be seen that subjects fare best in a real environment when compared to a virtual haptic one. It can also be seen that subjects perform this task better with virtual haptic feedback than when they are forced to rely on vision alone.

It can furthermore be seen that trial length is longer with virtual haptic environments than in real environments and that trial length is slightly longer with vision-only environments than with virtual haptic ones.
Discussion
One can see from these kinds of experiments that haptic feedback plays a significant role in peg-in-hole task performance in a six- degree-of-freedom environment. Task performance quantifiably diminishes as the quality of haptic sensory information degrades. It is also clear that the number of sensory channels available affects task performance. Tasks are performed better with vision and haptic feedback than with vision alone. We can determine user strategies for accomplishing a task by examining continuous recordings of position and force.
Some of our work with many more results is documented in the papers "Comparison of 3D Haptic Peg-In-Hole Tasks in Real and Virtual Environments," and "Virtual Peg-In-Hole Performance using a 6-DOF Magnetic Levitation Haptic Device: Comparison with Real Forces and with Visual Guidance Alone."
Texture Studies
We are performing a series of experiments similar to those described above for the perception of texture.