Vision-Guided Precision Assembly
(This project is no longer active)
Laura Cassenti, Ralph Hollis
 This project explores the precision assembly aspects of producing small, powerful wearable computers. Wearable computers are becoming more capable with increased levels of functionality, while at the same time they require the integration of greater numbers of heterogeneous components in ever more compact and light-weight arrangements. Lead counts on packages are increasing while lead spacings are decreasing. These trends are placing ever greater burdens on the assembly equipment which must be able to position and place package leads to a small percentage of the lead pitch while guaranteeing the avoidance of opens and shorts. Expensive and complex commericial equipment designed for larger planar circuit boards may be difficult to adapt to small batch runs with stringent accuracy requirements.
This project explores the precision assembly aspects of producing small, powerful wearable computers. Wearable computers are becoming more capable with increased levels of functionality, while at the same time they require the integration of greater numbers of heterogeneous components in ever more compact and light-weight arrangements. Lead counts on packages are increasing while lead spacings are decreasing. These trends are placing ever greater burdens on the assembly equipment which must be able to position and place package leads to a small percentage of the lead pitch while guaranteeing the avoidance of opens and shorts. Expensive and complex commericial equipment designed for larger planar circuit boards may be difficult to adapt to small batch runs with stringent accuracy requirements.
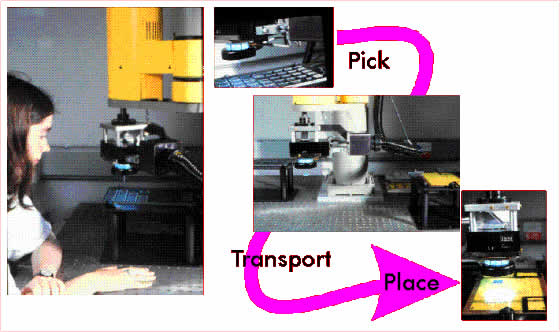
Rather than use more expensive high-accuracy motion equipment which often is based on laser interferometry and cumbersome granite and or cast iron bases for mechanical stability, we are using a new, more flexible approach. Our coarse-fine approach uses an ordinary industrial robot for coarse positioning which carries with it a precision mini-robot for fine positioning.
The coarse robot accesses a large workspace needed for component parts feeders but is not sufficiently accurate by itself to align and place the components during the assembly. The fine-motion mini-robot, however, is one-hundred to a thousand times more precise than the coarse robot carrying it, and is capable of rapid motion at the sub-micrometer level. The mini-robot carries pickup and placement tooling for the components and a high-resolution camera connected to a vision system. The mini-robot is directly controlled by visual alignment information, independently of the coarse robot motion.
This strategy has a number of important benefits for precision automated assembly of wearable computers. It eliminates the need for accurate fixturing, calibration steps, and accurate motion equipment, relying instead on sensing and closed-loop parts-workpiece alignment.
In the summer of 1996, we demonstrated placement of 100-lead packages in the Microdynamic Systems Laboratory as shown below.
As a second phase of this project, we are integrating vision-guided coarse-fine alignment operations with the CMU minifactory infrastructure which embodies the Agile Assembly Architecture. In the minifactory, the coarse-fine approach will be done using frictionless planar closed-loop motors which combine the ability to make large moves with the ability to make fine, micron-level alignment motions under vision guidance.
External Funding: ARPA