Free-Roaming Planar Motors
Tom Lauwers, Zack Edmondson, and Ralph Hollis
Autonomous planar motors for precision positioning
Imagine a mobile robot that could move over arbitrarily large distances in the plane at speeds on the order of a meter per second, yet be able to position itself with sub-micrometer motion resolution. Further, imagine that this robot is essentially an ideal frictionless mass with a single moving part. We are working to produce such a robot based on the concept of a free-roaming planar motor.
Autonomous precision planar robots based on free-roaming planar motors would constitute a new class of mobile
robots. Fleets of such robots could be readily deployed on "factory
floors'' comprised of contiguous arrangements of passive modular
platen tiles. Such robots could precisely move small samples or
products over many meters of space, interacting with each other and
with fixed processing and analyzing stations. Their projected motion
resolution of 100 nm (1 sigma) is sufficiently precise to enable the
realization of many important industrial applications such as gene
chip production, drug discovery, chemical synthesis and analysis,
biological assay, microassembly, MEMS packaging, and others.
Background
Bruce Sawyer in 1968
introduced the concept of the planar motor, commonly referred
to nowadays as the "Sawyer'' motor. This motor provides motion in
the plane (and limited rotation), thereby eliminating the need
for stacked linear stages to provide orthogonal degrees of freedom. Sawyer motors (forcers) are typically operated as open-loop steppers and have many advantages over conventional motors.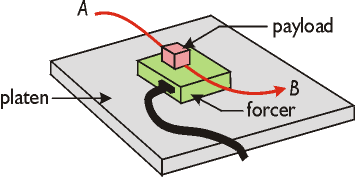
In the picture above, the forcer carries a payload along the path from A to B. The forcer incorporates air bearings that allow it to glide over the platen surface at altitudes of 10-15 micrometers. Air, power, and signals are carried in a tether that connects to a large control box. As part of our Architecture for Agile Assembly project, we have greatly improved the design and operation of these types of motors by changing them from open-loop steppers to closed-loop planar servo motors. The need for a tether, however, restricts motion and complicates motion planning, especially when multiple forcers are operated on a platen.
Initial efforts: tetherless planar motors
To eliminate the tether, power, electronics, communication, and bearing means must be incorporated in the forcer itself. Our first effort used 4 ball wheel bearings, onboard electronics, and wireless radio communication.

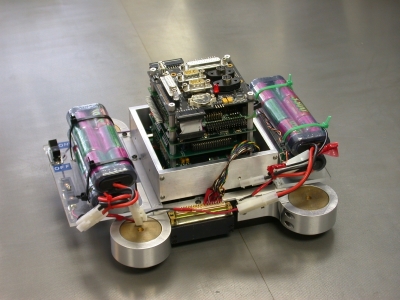
In our second version the wheels were replaced by an air bearing supplied by a small on-board air pump. The picture on the left shows the tetherless planar motor forcer near a gauge used to measure motor forces.
Operation of the free-roaming planar motors can be seen in the videos below:

The video on the right shows our tetherless planar motor with ball wheels moving slowly in a figure-8 motion (3 Mb).
The video on the right shows our tetherless planar motor with air bearing travelling over an array of platen surfaces (currently operating in open-loop stepper mode). Most of the sound comes from the noisy air pump (5.4 Mb).
The video on the right illustrates the maximum speeds attained so far in open-loop mode, about 0.75 m/s. We have demonstrated operation for up to 27 minutes on a battery charge (3 Mb).

The video on the right shows the tetherless planar motor's ability to change directions and cross over cracks between platen tiles (0.5 Mb).
Next steps
Most of the power needed for operation is used by the onboard pump supplying air for the air bearing. More efficient pumps and higher energy batteries could perhaps double the operation time. The real solution will be to supply air through the platen surface. We believe this can be done using arrays of microvalves integrated into the platen surface. Valves would only release high pressure air when a planar motor forcer was over them. This is not so easy to do, but we are working toward this goal. Calculations show that if this can be achieved, the forcer can be made much smaller and lighter, and operating times can be extended to 5-6 hours on a battery charge, paving the way for autonomous planar robots to become a practical reality.
More information can be found in the papers "Free-Roaming Planar Motors: Toward Autonomous Precision Planar Robots,'' and "Progress in Agile Assembly: Minifactory Couriers Based on Free-Roaming Planar Motors.''