The AMASC
Jonathan Hurst, Joel Chestnutt, Al Rizzi
Overview
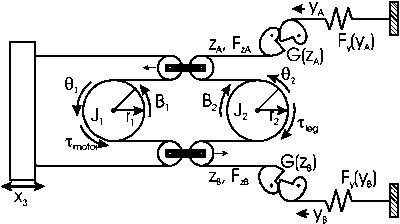
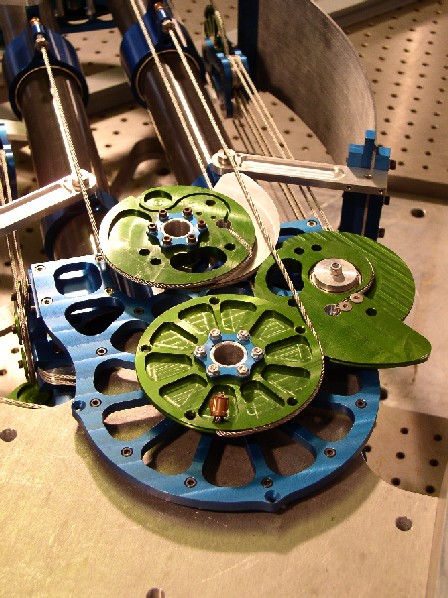
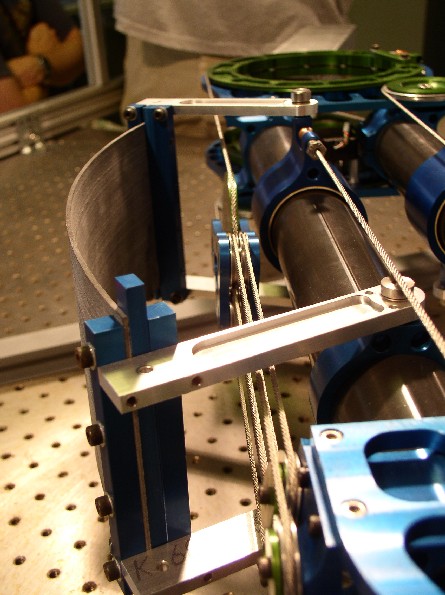
This actuator is designed for use in a highly dynamic legged robot. It has fiberglass springs with a large energy storage capacity. The mechanism has two motors, one for moving the position of the knee and the other for controlling the stiffness felt at the knee. These two parameters, along with the hip angle, are used for control of a running gait.

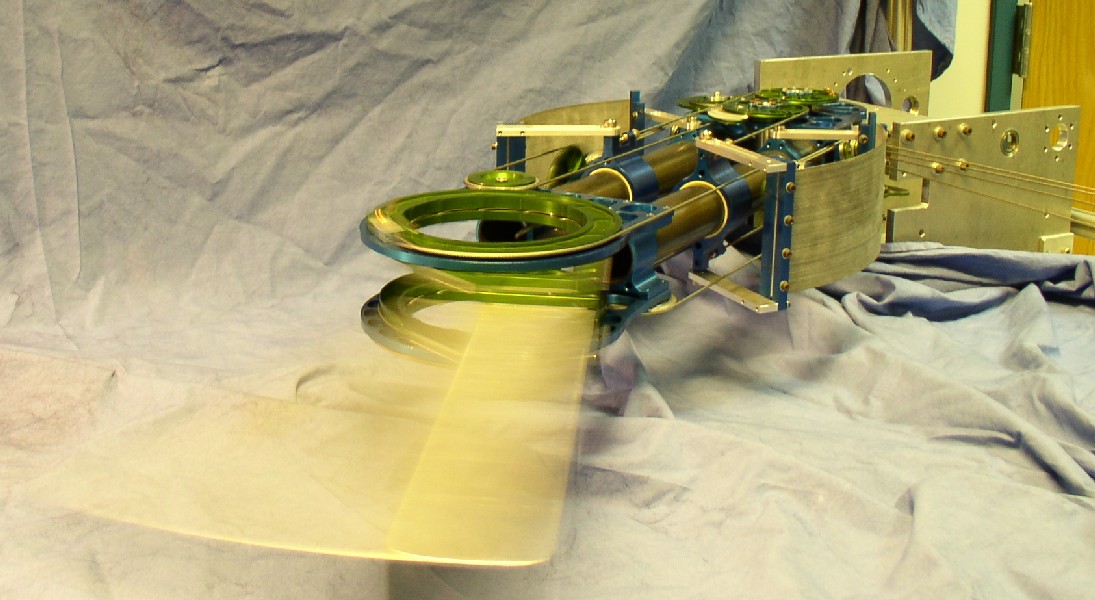
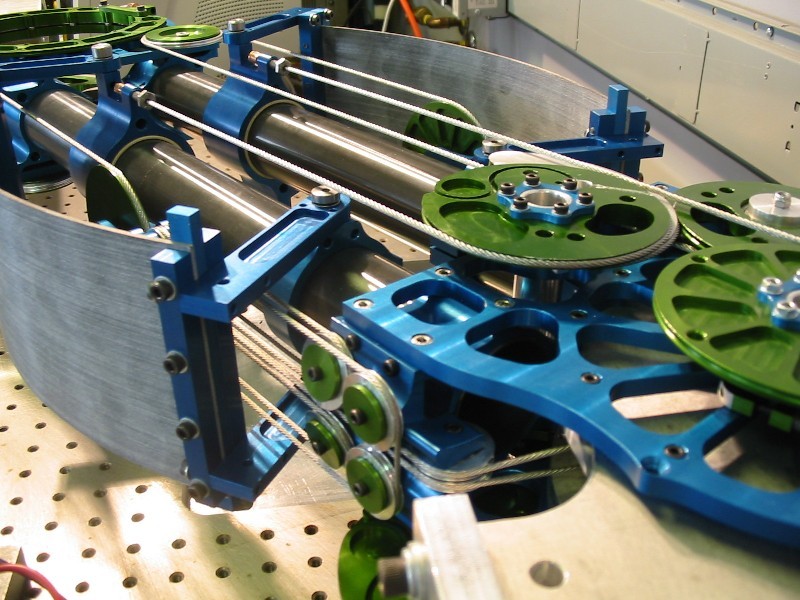
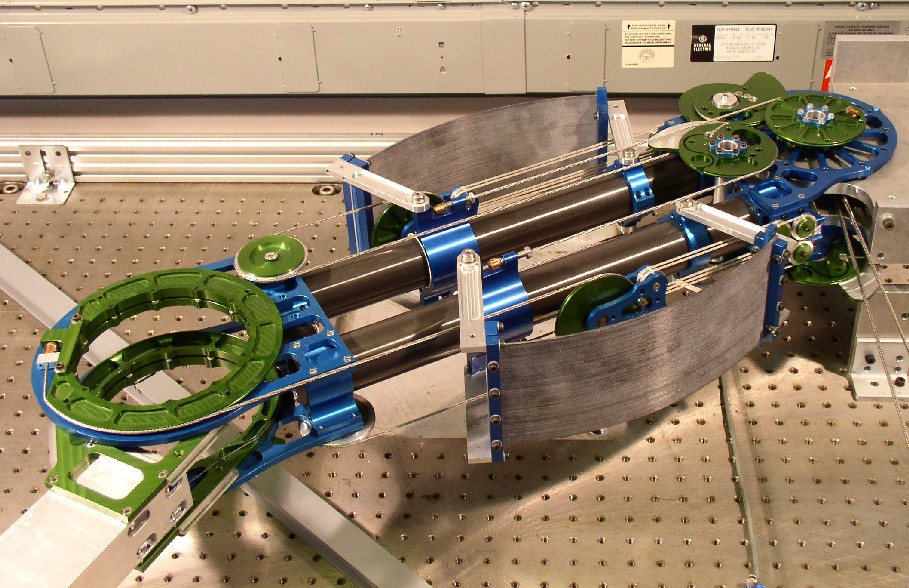
Pictures
|
|
Movies
Changing the stiffness of the AMASC 7.5MBZero stiffness (zero force) 5.8MB
Publications
- "An Actuator with Physically Variable Stiffness for Highly Dynamic Legged Locomotion" J.W. Hurst, J. Chestnutt, and A. Rizzi Proceedings of the 2004 International Conference on Robotics and Automation, May, 2004.
- "An Actuator with Mechanically Adjustable Series Compliance" J.W. Hurst, J. Chestnutt, and A. Rizzi tech. report CMU-RI-TR-04-24, Robotics Institute, Carnegie Mellon University, April, 2004.